Linear differential system
A linear differential system has the form
where
Solutions
The solution is given by the Matrix exponential, but may alternatively be found by finding the eigenvalues of the matrix
Unique eigenvalues
If the algebraic multiplicity is the same as the geometric multiplicity for each eigenvalue,
take nonzero eigenvectors
Complex conjugates
If the eigenvalues are complex conjugates
Repeated eigenvalues
If the algebraic multiplicity is the same as the geometric multiplicity for each eigenvalue, the same method as above can be used. However, if the geometric multiplicity is less, the solution will have the form
where
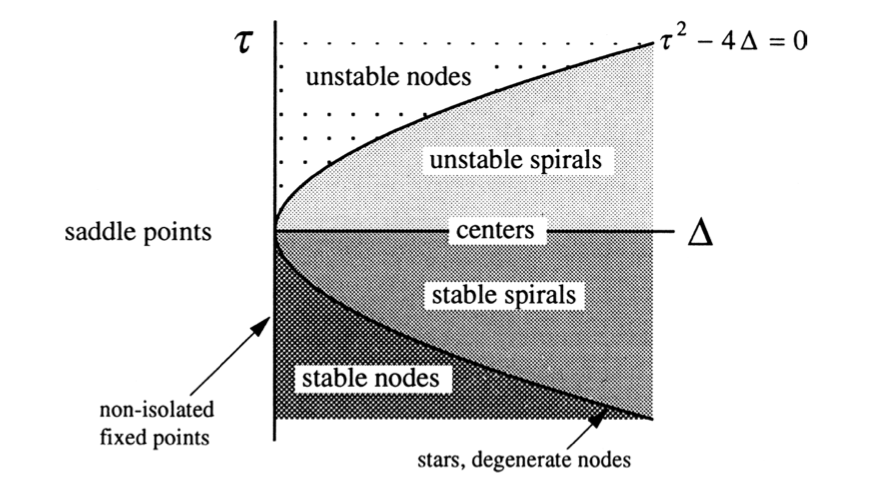
Stability of the origin
- If both eigenvalues are negative then the origin is a stable node.
- If both eigenvalues are positive then the origin is an unstable node.
- If the eigenvalues are equal with geometric multiplicity 2 then the origin is a star or symmetric node.
- If an eigenvalue has more algebraic multiplicity than geometric, then it is a degenerate node.
- If some eigenvalues are negative and some are positive, the origin is a saddle point.
- The eigenspace of a negative eigenvalue is a stable manifold, the eigenspace of a positive eigenvalue is an unstable manifold.
Trajectories typically approach the origin tangent to the slow eigendirection.
Practice problems
- 2017. Elementary differential equations and boundary value problems
- Real-valued: pp. 318–319 (§7.5 problems)
- Complex-valued: pp. 327–329 (§7.6 problems)
- Repeated eigenvalues: pp. 343–345 (§7.8 problems)